
Flipper BEN HUR (suite 2/3).....
Les premiers essais sont très concluant. Le rendu est impeccable et la lumière générée par la led est bien diffuse, avec en prime une consommation raisonnable. caque led consomme environ 60 mA.
Ma petite vingtaine de led consomme donc moins d'1,2 A ! Bien en dessous de la consommation des anciennes leds... Avec un effet plus "péchu"
/////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////
Arduino + Arduino + Arduino ... (mon) ticket gagnant !
A partir de ce stade, je ne peux plus me défiler et il va quand même falloir que je regarde plus en détail la solution technique que je vais devoir choisir pour gérer le flipper. A la lecture de ce site et en visualisant la vidéo du flipper en fin de page, beaucoup seront tentés de dire : houaaa trop fort... t'es un petit génie !
Bon attention... la je vais un peu casser le mythe... Non je ne suis pas un petit génie. En fait la gestion d'un flipper n'est pas aussi complexe qu'il n'y parait. Ainsi, en simplifiant la description, il suffit simplement de venir "lire" l'état de différents contacts, puis en fonction de ces états, d'allumer des lampes (ou des leds) sous les inserts, de comptabiliser un score, d'afficher ce score sur des afficheurs numériques ou une matrice à leds et accessoirement de générer des sons en rapport avec l'action de la bille.
Bon... je ne veux pas non plus plus verser dans la fausse modestie. Ce type de réalisation n'est pas non plus à la portée de tout le monde (sans quoi beaucoup d'autres personnes aurait déjà réaliser leur propre flipper !).
Je pense honnêtement que la plupart des programmeurs de niveau "moyen" peuvent y parvenir (à condition d'utiliser la bonne méthode).
Pour ma part, je ne suis pas programmeur de mon métier. J'ai un simple petit BTS électronique en poche (section F2 à mon époque). S'il est vrai qu'à mon actif, j'ai quand même déjà réalisés quelques développements de systèmes plus ou moins complexes... c'était il y a plus de vingt ans et je n'ai jamais fait d'études en tant que programmeur (je suis plutôt autodidacte dans ce domaine).
En fait la principale difficulté dans la conception d'un flipper réside dans le fait qu'il faut pouvoir gérer toutes les actions décrites ci-dessus de façon "quasi-simultanée". Pourquoi ? Tout simplement parce que au moment ou la bille touche une cible, il faut pouvoir afficher le score et générer les sons... tout en continuant à suivre l'état des autres cibles afin de ne "perdre" aucune une action. Ainsi par exemple pendant l'affichage d'une animation sur votre matrice à led, vous devez toujours être en mesure de pouvoir continuer à surveiller ce que fait la bille.
Pour pouvoir réaliser "ce tour" de force, il n'y a généralement pas 36 solutions ! La principale solution consiste à utiliser une carte microcontrôlée capable de gérer du multitâche (c'est à dire capable de gérer plusieurs actions en même temps). C'est en partie ce qu'à utilisé Benheck sur son premier flipper en utilisant un Propeller de chez Parallax. C'est également ce qu'il a du utiliser (même s'il n'en fait pas ouvertement mention) dans son second flipper avec une carte ChipKit Max32 de Digilent sur laquelle il doit faire tourner un "noyau" multitâche.
Comme je l'ai déjà précisé avant, je ne suis pas programmeur de formation, je développe le flipper sur mon temps libre (et uniquement pour mon plaisir). Dès lors, je n'ai pas envie de me prendre trop la tête et de m'investir de trop dans du développement multitâche.
C'est pourquoi j'ai eu l'idée de contourner le problème en décomposant ce dispositif compliqué... en plusieurs dispositifs "simples" !
Je m'explique... Plutôt que d'avoir une seule platine microcontrôlée qui devra gérer: l'affichage de la matrice à leds, les contacts du flipper et les leds sous les inserts, j'ai choisi d'utiliser une platine microcontrôlée principale qui analysera l'état des contacts du plateau et qui en fonction de ces états enverra (à une seconde platine) l'ordre d'allumer - d'éteindre ou de faire clignoter les leds sous les inserts... et cette même platine principale enverra également l'ordre à une troisième platine d'afficher les scores et des animations sur des matrices à leds.
Alors bien sûr les programmeurs "Pro" qui tomberont sur mon site vont surement rigoler un peu et dire que je suis un piètre programmeur pour avoir recours à ce type de stratagème pour combler mes lacunes. OK j'assume... .. et pour tout dire je "persiste et signe" le choix de cette solution technique... qui à mon sens n'est peut être pas aussi idiote qu'il n'y parait. Voici donc ci-dessous le schéma général simplifié de l'électronique utilisée sur mon plateau.
Gestion de l'éclairage des inserts, des rollover et du bumper
/////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////
Branchement (enfin) des batteurs !
/////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////







Je dois également concevoir un nouveau support 'en forme de "L") pour les leds qui se trouvent dernière les cibles fixes.
Je passe également commande d'un set de caoutchouc neuf, de contact pour les boutons-poussoirs (que je n'ai pas encore commandés, ainsi qu'un mylar de protection destiné au bumper... et à une bille !
Oui ça parait bête... mais jusqu'à présent je n'avais pas de bille. A sa réception, je ne me suis amusé un moment à la lancer dans les différentes partie du flipper !
Ça y est, j'ai remplacé toutes les lampes liées à l'éclairage du décor par mes leds. Je suis très satisfais du résultat. Je vais maintenant entrer dans le vif du sujet et attaquer le développement à proprement parlé du pilotage du flipper. Parti sur ma lancée, je décide de d'attaquer la gestion de l"éclairage des inserts

J'aurais l'occasion de décrire en détail chaque partie dans la suite de ce site. Mais voici une petite description succincte de l'ensemble. En premier lieu, plutôt que de devoir développer ma propre carte électronique, j'ai choisi de sélectionner des cartes "toute faites" disponibles un peu partout dans le commerce (vous allez finir par croire que je suis faignant !). En l’occurrence il s'agit de carte de type Arduino. Ces cartes ont l'avantage d'être assez "puissantes et rapides" pour mon usage et relativement "bon marché".
J'ai utilisé un modèle UNO 328 (carte 2) pour le pilotage des leds sous les inserts et 2 cartes MEGA2560 (carte 1 et 3) pour la carte principale et la carte de gestion de l'afficheur.
Bon voyons maintenant le "pour" et le "contre" de cette solution technique... opposé à une solution avec une carte multitâche:
Solution A: Carte unique avec gestion multitâche:
Avantage: coût réduit
Contrainte: connaissances et compétences plus élevées nécessaires... en gros ce type de développement n'est vraiment pas à la portée de tous.
Solution B: 1 carte principale + 2 cartes "esclaves"
Question coût: Quoi ... 3 cartes au lieu d'une seule ? Tu as gagné au loto pour pouvoir développer ton flipper ?
On se calme.... Oui pour développer ce flipper prototype, j'ai utilisé (pour des raisons de simplicité les cartes arduino officielles permettant une connexion rapide au PC via un câble USB standard. Toutefois il existe une multitude de cartes compatibles arduino (appelées clones) qui sont pour la plupart 100 % compatibles et qui sont généralement moins chères.
Il existe également des cartes dites allégées (que je compte utiliser dans le flipper 100 % personnel). Ces cartes ne disposent pas de tous les connecteurs et autres accessoires . Par exemple une carte arduino uno328 standard coûte environ 19.50 €, une carte "allégée" compatible coûte au environ de 11.50 €. La carte MEGA2560 officielle est au alentour de 36 €... la version clone se trouve à moins de 30 €.
Le coût de la solution "3 cartes" peut ainsi revenir alors au environ d'un peu mois de 72 € (je ne parle uniquement que des platines microcontrôlées). Ce qui reste du domaine du raisonnable
Avantage: Vous pouvez développer un flipper de façon bien plus simple et avec moins de compétence.
Pour en finir sur le choix de mon architecture, je dois préciser qu'il est tout à fait possible d'utiliser une seule platine arduino pour piloter un flipper. J'ai déjà vu un ou deux sites Internet présentant des prototypes de flipper pilotés avec un seul arduino... mais il s'agissait de modèle de flipper avec un affichage des points très "simple" sur un petit écran LCD alphanumérique ou quelques digits 7 segments à leds (lequels ne présentait que la représentation du score). De même le pilotage des leds sous les inserts semblait également assez limité. Dans ce cas, il est effectivement possible de n'avoir recours qu'à un seul arduino pour piloter tout le plateau.


Bon... J'en vois encore plusieurs parmi vous qui se grattent encore la tête en se disant que j'abuse quand même un peu d'avoir "collé" une platine microcontrôlée spécialement dédiée à l'éclairage des inserts, des rollover et du bumper. Vous allee enfin comprendre pourquoi en lisant ce qui suit...
Il faut savoir que le nombre de lampes utilisées pour ces éclairages et généralement assez élevé. Par exemple pour le flipper BEN HUR (qui est un plateau assez simple), il n'y a pas moins de 35 lampes dédiées au inserts, aux rollover et au bumper. Mine de rien ceci nécessite beaucoup de ports d'entrées/sorties sur votre platine microcontrôlée (quelquefois plus que ce dont la platine dispose !).
Dès lors , la solution généralement utilisée pour piloter ce grand nombre de lampes, consiste à associer des circuits intégrés d'extension à sa platine microcontrôlée.
Il existe une multitude de circuits intégrés d'interface permettant d'ajouter très facilement 8 ou 16 ports via une communication SPI ou I2C (tels que des circuits PCF8574, MCP23017, 74HC595...). S'achant qu'il est possible d'utiliser plusieurs de ces circuits sur votre platine microcontrtôlée, il sera alors très simple d'augmenter le nombre de sorties pour pouvoir piloter l'éclairage des inserts, des rollover et du (ou des) bumper. Ces circuits d'interface doivent également être associés à des transistors de puissance pour pouvoir piloter les lampes. Il est ensuite très simple de pouvoir piloter une lampe parmi les autres en ne pilotant que le circuit intégré d'extension sur laquelle est reliée la lampe.
Si j'avais utilisé cette solution, il m'aurait donc fallu ajouter 5 circuits intégrés d'extension (à 8 sorties) et 35 transistors de puissance !
Dès le début de mon projet (c'est à dire lorsque j'ai commencé à développer la matrice à leds pour l'affichage des scores), j'avais déjà en tête d'une autre solution pour le pilotage de l'éclairage des inserts, des rollover et du bumper.
En premier lieu, je savais que je ne conserverais pas la solution d'éclairage par lampes et que j'utiliserais une solution d'aclairage par leds.
Par le passé, j'avais souvent regardé avec attention les rubans à leds multicolores. La plupart de ces rubans vous permettent de modifier la couleur de toutes les leds d'un coup. De rares modèles permettent également de modifier indépendamment la couleur de chacune des leds. Comme par exemple ce modèle équipé de leds avec contrôleur intégrés de type WS2812. Par contre, d'après sa description, il semble que sonr pilotage nécessite l'envoi d'une trame au timing très rigoureux.
Du fait que les inserts du BEN HUR soit déjà "colorés" ( blanc opaque ou rouge), j'envisage d'avantage l'utilisation de leds de couleur blanche. Et après une nouvelle recherche sur les différents types de rubans existants, je suis tombé sur ce modèle de leds à base de contrôleur APA102. Ces modèles peuvent se monter en série et se pilotent par un simple bus SPI. De plus elles semblent (toujours d'après leur doc) beaucoup plus réactives et simples à piloter que les modèles avec contrôleur WS2812.



J'envisage donc de souder à nouveau ces leds sur des supports (comme celles de l'éclairage du décor). Par contre ça va encore être un peu la galère et je risque d'avoir de la "perte" lors de cette opération..
En ayant parlé à mon frère, ce dernier me fait alors remarquer que je n'ai qu'a prendre un ruban à leds multicolores basé sur le même principe et que je n'aurais qu'à choisir la couleur blanche (qui même si elle ne sera pas aussi intense que des vraies leds blanches devrait être largement suffisante pour éclairer les inserts). Bingo ... je pense effectivement tenir ma solution.
Mon choix se porte alors sur ce modèle de ruban. Ce dernier existe en plusieurs versions. Pour ma part, je choisi un modèle sur lequel les leds sont assez raprochées. Il dispose d'une gaine de protection translucide qu'il me faudra enlever. J'ai en fait dans l'idée de couper les segments de leds, de les placer sous les différents inserts et rollover et des les relier en série les un aux autres. Ce type de ruban se coupe très facilement car le circuit imprimé qui supporte les leds est souple.
Si cette solution fonctionne, je me passe des 5 circuits d'extension, ainsi que des 35 transistors et je ne monopolise que 2 ports d'entrées/sorties sur mon arduino !
Bon je viens de recevoir le ruban. Il me faut maintenant le tester. L'avantage d'avoir choisi une solution sur la base d'un arduino est qu'il existe généralement pratiquement tout le temps des librairies pour pouvoir mettre en oeuvre rapidement toute sorte de chose. A noter que le développement sur un arduino s'effectue en langage "C". Je ne suis pas particulièrement "fan" de ce type de langage (j'ai plutôt été bercé très longtemps par du développement en langage "BASIC" sur TRS-80, puis ORIC1, puis AMSTRAD, puis ATARI-ST avant de ne développer ensuite qu'en assembleur sur 6809, Z80, 8051 et PIC).
Bon... le passage au langage "C" n'est pas si compliqué. La librairie une fois chargée dans le répertoire de l'environnement de développement de l'arduino m'offre directement un exemple d'application permettant de piloter les leds du ruban (avec la couleur blanche) selon différents niveau de luminosité. Exactement ce que je recherche (à croire que l'exemple à été écrit pour moi !). Je place tant bien que mal une des leds du ruban sous un insert et obtient un excellent résultat visuel !








J'ai donc imaginé un nouveau support pour recevoir les segments des leds afin de pouvoir les disposer à l'envers dans les inserts. Les photos ci-dessous montre le croquis du support ainsi imaginé, puis sa conception sur le logiciel pour l'imprimante 3D (encore merci à mon frère steve !) et enfin sa réalisation "physique".
Chaque segment de led que j'ai découpé dans le ruban dispose en fait de 8 connexions. J'ai enfiché et soudé des petits connecteurs 4 broches mâle / mâle dans ces connexions et enfiché ces connecteurs dans les 8 trous que j'ai prévus sur mon support. Ce dernier dispose également d'une rainure qui me permet d'utiliser la vis de fixation de l'ancien support de lampe pour le loger dans l'insert. Les photos ci-dessous seront plus explicite que mon explications !
Gardant toujours à l'esprit que le BEN HUR est un flipper de développement et que le but recherché à terme est le développement de mon propre flipper 100 % personnel (sur lequel j'envisage d'utiliser un éclairage multicolore sous les inserts), je modifie le programme pour générer différentes couleurs qui défilent sur toute la longueur du ruban. Le résultat est superbe.
Maintenant, il me faut modifier et adapter totalement le programme de gestion du ruban pour essayer d'allumer uniquement certaines leds et avec certaines couleurs distinctes. Après un petit moment, j'obtiens alors exactement ce que je recherche. Je peux dès lors piloter l'état (allumée ou éteinte) de chacune des 60 leds que composent mon ruban et je peux aussi sélectionner n'importe quelle couleur pour ces leds.
La "mise à jour" des leds est immédiate et je n'observe aucun temps de latence. Cette solution est donc totalement viable.
J'ai pris soins d'utiliser des fils d'une section suffisante pour relier les différentes leds les unes aux autres afin d'éviter les chutes de tension. J'ai également essayé d’optimiser le "chemin" qui mène d'une led à l'autre afin de limiter la longueur total des liaisons. Etant maître du programme permettant le pilotage des leds, je peux me permettre de choisir le "chemin" le plus court (peu importe l'ordre dans lequel sont chaînées les leds). La dernière chose auquel j'ai fait attention et d'éloigner autant que faire ce peu les liaisons de mes leds des signaux de puissance des bobines des batteurs, du bumper, de la remonté de cible, etc... afin de limiter les perturbations et interaction sur le bus SPI les leds (même s'il n'y aura pas de liaison électrique, ni de masse commune entre les 2 circuits d'alimentation... je prefère observer cette précaution). Au titre des précautions, j'ai enfin positionné quelques condensateurs découplage en parallèle sur l'alimenation à différent point du "chemin des leds".
Ci-dessous la photo du ruban dont j'enlève la gaine de protection translucide et dans lequel je découpe les segments de led. Je décide désormais d'enlever totalement toutes les lampes et leur support des inserts, des rolover et du bumper... une partie du "beau" câblage initial disparait avec cette opération.









Mon plateau est désormais totalement dépouillé de toutes ses lampes et de leurs supports.
J'en ai profité pour commander une coupelle neuve pour le bumper ainsi qu'une nouvelle bille, des boutons-poussoirs pour les batteurs et des condensateur anti-étincelage.
J'ai également imprimé les supports en grande quantité afin de pouvoir commencer le câblage des leds sous les inserts.
Les photos ci-dessous montrent l'emplacement des inserts "vides" (photo de gauche), puis la mise en place des supports (équipés des leds) dans les inserts (photo du milieu) sur lesquels j'ai pris soin d'effectuer un repérage grossier (mais utile) de la polarité des entrées d'alimentation (on a vite fait de se tromper du fait que les inserts soit monté dans tous les sens) et enfin le câblage en série des différentes leds (photo de droite).





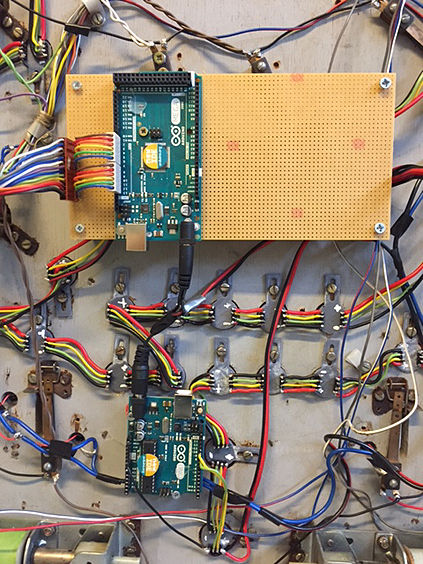
Les photos ci-dessus montre la platine arduino UNO 328 dédiée au pilotage des leds (pour rappel : la platine N° 2 sur le schéma théorique).
J'ai pris soins de tester systématiquement le bon fonctionnement des leds (à chaque fois que j'avais fini d'ajouter 3 à 5 leds) - La photo de droite montre la lumière des leds qui se diffuse à l'arrière des supports.
L'éclaiage des rollover à nécessité que je surélève les supports. N'ayant pas d'entretoise sous la main et sous l’impulsion du système "D"... j'ai utilisé des chevilles que j'ai coupée à la bonne longueur !

Le câblage de la led à l'intérieur du bumper à nécessité que j'agrandisse quelques trous pour pouvoir faire passer toutes les connexions de la led.

Dans la pratique ceci ne pose pas vraiment de problème. Il suffit simplement de disposer d'une variable de type "tableau" dans laquelle on stockera l'état de toutes les leds et de demander à l'arduino de "balayer" le tableau en envoyant les données du tableau à la matrice. Pour modifier l'état d'une led, il suffit simplement de modifier la valeur dans le bon emplacement du tableau et de renvoyer à nouveau le contenu de tout le tableau vers le ruban.
Le rafraîchissement du ruban est (comme je l'ai déjà indiqué ci-avant) très rapide et quasiment imperceptible pour l’œil. Mais cette durée est tout de même significative. Dès lors, si j'avais choisi de piloter le ruban à led directement depuis la platine principale 1 (MEGA-2560), cette dernière serait alors occupée de façon plus intensive et prolongée à mettre à jour l'état des leds de la matrice qu'avec mon architecture actuelle. Le risque est alors que l'arduino MEGA 2560 pourrait dans le pire des cas rater la sollicitation d'une cible par la bille pendant qu'elle enverrai l'état des 35 leds du plateau du BEN HUR.


Le câblage est maintenant terminé... Ouf... j'ai passé pas mal de temps dessus. La photo de gauche montre le "chemin" utilisé pour relier toutes les leds des inserts.
Allez je raccorde l'arduino au port USB de mon PC, je modifie quelques ligne de code et demande à l'arduino d'allumer toutes les leds avec la couleur blanche (photo en bas à gauche). Le résultat est impeccable. Malgré des inserts qui ne sont pas tous en bon état, la lumière est bien uniforme et très dense. Tiens juste par essai, je modifie la couleur de la led d'un insert. Le résultat est génial ! J’entreprend alors de modifier la couleur de tous les inserts pour un résultat encore meilleur ! (photo en bas à droite).
Maintenant je m’attelle à l'écriture du programme de l'arduino qui va gérer le ruban.
Pour résumer simplement mes explications (voir le schéma théorique en haut de la page), la platine principale MEGA 2560 (platine 1) qui s'occupe de détecter le passage de la bille sur les cibles et autres contacts enverra des ordres via une liaison série à l'arduino uno 328 (platine 2) afin que celle-ci allume ou éteigne les leds du ruban. Ces ordres sont matérialisés par une suite de 2 octets.
Le premier octet sert à déterminer si on veut piloter directement une des leds de la matrice (en précisant le N° de la led) ou si on désire envoyer une "action" particulière sur les leds (par exemple initialiser toutes les leds dans un état particulier au démarrage d'une partie ou encore éteindre une led et en allumer une autre simultanément).
Si on choisi de modifier l'état d'une led, le second octet permet de définir son état proprement. Je peux avec cet octet définir la couleur de la led (parmi 8 au choix: blanc, bleu, vert, rouge, jaune, bleu clair, violet, vert clair), ainsi que son état: allumée, éteinte, clignotante "lente", clignotante "rapide", allumée uniquement un court instant ou en mode "dimer" (ce choix permet de voir la led s'illuminer de plus en plus fort, puis son intensité lumineuse décroit de plus en plus et ainsi de suite (à image du voyant de veille présent sur les Mac). J'ai volontairement limité le nombre de couleurs car du fait de l'opacité de mes inserts, les variations de couleurs proches ne se distinguent pas vraiment. J'ai donc choisi des couleurs qui se distinguent le plus les unes des autres).
Pour en revenir au pilotage du ruban, ce dernier est très simple. La seule limitation est qu'il n'est pas possible d'adresser directement une led particulière dans le ruban. Si par exemple vous désirez modifier la couleur de la 3ème led du ruban, vous ne pouvez pas vous contenter d'envoyer uniquement la nouvelle couleur de cette led au ruban. En fait dans ce cas, il vous faut systématiquement renvoyer l'état de toutes leds du ruban (en modifiant alors uniquement la couleur de la 3ème et en laissant les couleurs inchangées des autres leds).

Dans mon cas, la platine MEGA-2560 n'est monopolisée uniquement que pendant l'envoi de 2 "petits" octets (ce qui préserve son acuité à pouvoir surveiller précisément le déplacement de la bille). Ceci à d'autant plus d'importance que le plateau du BEN HUR est un plateau relativement simple que que le flipper 100 % personnel que j'envisage de développer après risque de comporter encore plus de leds (et donc nécessiter plus de temps pour le rafraîchissement de la matrice.
L'autre avantage appréciable de ce type d’architecture et pour la gestion des clignotements des leds. Dans le cas présent, je peux choisir de faire clignoter n'importe quelles leds du ruban (une ou plusieurs leds) de façon lente ou rapide ou en mode "dimer". Ainsi une fois que la platine MEGA-2560 à envoyé cet ordre à la platine UNO 328, celle-ci s'occupe de faire clignoter les leds concernées et la platine MEGA-2560 ne s'occupe plus de rien. Ceci à une énorme importance dans la conception du programme de gestion du fonctionnement proprement dit du flipper. En l'absence de cette fonctionnalité, il me faudrait prévoir directement des timers et autres artifices pour gérer les différents clignotement en fonction des "différents états du jeu". Dans cas présent les clignotement sont gérés automatiquement en tâche de fond par le 2ème arduino.
Dans le cadre du BEN HUR, je me suis limité à 3 types de clignotements. Pour mon prochain flipper, j'envisage déjà de programmer l'arduino uno-328 pour qu'il puisse réaliser plus d'effets lumineux sur les leds du ruban (comme par exemple 3 ou 5 ou 10 clignotements rapides des leds ou un clignotement pulsé, etc...).
A noter enfin que j'ai créé un buffer de réception série capable de mémoriser les 15 derniers ordres reçus en provenance de la platine MEGA-2560 principale afin de ne rater aucun "ordre d'affichage" en cas de déplacement et de sollicitation rapide et consécutive de différentes cibles par la bille. Sans dévoiler la suite des explications sur les règles du jeu du BEN HUR que je détaille ci-après, je montre dans la vidéo présente toute à la fin de la description de ce site que la platine UNO 328 enregistre bien les ordres reçus très rapidement en provenance de la platine MEGA-2560 afin de toujours rafraîchir après coup l'état des leds sans "sauter" d'étape et omettre d'allumer un insert.
Voilà vous savez maintenant le "pourquoi / du comment" du choix de mon "architecture" multi-arduino !
Je termine le développement du programme de l'arduino UNO 328 en réalisant une petite animation "sympa" sur les différentes leds (défilement de haut en bas, de bas en haut, de droite à gauche, clignotements, etc.. - voir la vidéo à la fin de la description). Je prévois d'effectuer cette animation lorsque le flipper sera au repos en attente de joueurs. J'ai d'ailleurs déjà intégré ceci dans le programme qui réalise cette animation des la mise sous tension. A ce stade, il suffit que la platine reçoive un n'importe quel ordre série pour que cette animation stoppe et que la platine se mettre en attente d'une commande pour piloter ses leds. J'ai également prévu un ordre série spécial qui une fois reçu, ordonne à la platine de démarrer à nouveau l'animation sur les leds (cet ordre sera envoyé par la platine principale en fin de partie une fois que le joueur aura perdu).
Gestion de l'éclairage des inserts, des rollover et du bumper
/////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////
Bourgogne Game Show 2016 - Règles du jeux - Transfo du BEN HUR
/////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////
Un bon mois s'est déjà écoulé depuis que je travaille sur le plateau du BEN HUR. Bon... inutile de dire que comme cela m'étais déjà arrivé lorsque j'avais construit ma borne d'arcade, je suis "a fond" sur mon projet... mon esprit en entièrement accaparé (je pense flipper, je mange flipper, je rève flipper !)... Tout ça pour dire que ça râle un peu à la maison (ceux qui sont mariés me comprendront...).
Maintenant que la partie gestion des leds est terminé, il me faut attaquer la gestion des contacts et des cibles. Mais avant cette opération, il me faut impérativement et en premier lieu connaître les règles du BEN HUR afin que je puisse les reproduire le plus fidèlement possible. Un petit passage sur divers forum me fait faire la connais-sance de "Rumba" qui m'expose très gentiment ces dernières et m'indique qu'un exemplaire du BEN HUR sera présent sur le salon du Bourgogne GAME SHOW.
C'est donc tout naturellement que le dimanche 25 septembre 2016, je me suis rendu au BGS (diminutif de Bourgogne GAME SHOW).








Inutile de dire que j'y ai passé une excellente journée.
Ce salon proposait une formidable collection de flipper et de bornes d'arcade en tout genre (tous en libre accès) ainsi que divers stands sur lesquels vous pouviez acheter toutes sortes de pièces et accessoires pour les flippers.
Je ne saurais trop conseiller à tous ceux qui lisent ces lignes de visiter ce salon (même si vous êtes un peu loin de ce dernier.... ce qui était mon cas... le détour en vaut bien la peine).
J'ai donc passé tout mon dimanche à jouer sur une multitude de flipper (de mémoire il y en avait pratiquement près d'une centaine d'exemplaires différents !). Et j'ai bien sûr pu approcher le fameux BEN HUR et faire la connaissance de son heureux propriétaire (en la personne d' Alain). Au premier coup d’œil sur le flipper, j'ai pris une première grosse claque. Le plateau de ce dernier était tout simplement sublime ! Le revêtement était entièrement lisse et sans aucun défaut au niveau des inserts (ha... j'en bave encore !). Je me rend compte de l'écart d'usure qu'il y a entre mon plateau et celui présent sur le salon.
La deuxième claque je l'ai eu lorsque j'ai pu voir l'envers du plateau. Une fois encore ce dernier n'avais rien à voir avec mon exemplaire (voir la photo un peu plus bas). En dehors du fait que ce dernier ne présente aucune trace de rouille, ni d'oxydation, on dirait que celui ci n'a pas fait l'objet d'un câblage identique tant il est encore plus "propre" et ordonné que mon exemplaire.
J'ai pris énormément de photos du fronton du flipper (afin de pouvoir espérer reproduire ce dernier ultérieurement). Et puis j'ai enfin pu jouer à ce dernier. Avoir un plateau sous la main... c'est bien, mais pouvoir y jouer c'est mieux !). J'ai en fait également joué dessus pour bien m'imprégner des règles du jeux.
J'ai également pris quelques vidéos du jeu et posé pas mal de questions à Alain (pour la petite histoire, je l'ai également embêté un bon nombre de fois par email après le salon pour avoir des compléments d'informations sur le rôle de tel ou tel contact, sur le nombre de points générés par tel autre, etc...).
Alain m'a toujours très gentiment répondu et je l'en remercie à nouveau. Il m'a également fourni les plan du flipper sans lesquels je n'aurais pas pu comprendre comment piloter les batteurs... Donc encore merci !
En parlant du BEN HUR, à noter que lors de la découverte des différents flippers présents sur le salon, je suis tombé sur le flipper VULCAN dont le personnage du fronton m'a fait furieusement pensé à celui présent sur le fronton du BEN HUR ! En fait le BEN HUR est basé sur des pièces issues de flipper Gottlieb.
A y regarder plus près les fabricant du BEN HUR ne se sont pas contenté de récupérer simplement des pièces Gottlieb. Regardez le logo de STAAL et celui de Gottlieb et dite moi si rien ne vous choque ?
Bon revenons à nos moutons: Le BEN HUR dispose de règles du jeux assez simples (ce qui n'est pas plus mal pour moi, pour le développement de ce premier flipper).
Ce dernier dispose de divers passages ou cibles numérotés en chiffres Romain de 1 à 5 (I, II, III, IV, V) dans lesquels vous devez faire passer la bille pour allumer les leds de 5 inserts (également numérotés I, II, III, IV, V) au bas du plateau. Il existe plusieurs passages ou cibles pour un même chiffre Romain et peu importe le passage que vous empruntez (vous pouvez ainsi par exemple passer par un des 2 passages marqués V pour valider la led de l'insert V au bas du plateau - en fait lorsque la bille passe par un des 2 passages marqués V (dont les leds sont initialement allumées), le flipper éteint les leds des 2 passages marqués V et allume celle de l'insert V au bas du plateau. Si vous arrivez à allumer les 5 inserts I, II, III, IV et V, vous gagnez une extra-balle.
Le plateau dispose également de 5 cibles tombantes qui si elles sont toutes touchées déclenchent le double bonus. A ce stade un des insert présent devant les 4 cibles fixes au milieu du plateau) s'allume. Si vous touchez la cible qui se trouve juste au dessus de l'insert allumé vous gagnez 20.000 points. La position de l'insert allumé se déplace également d'une cible fixe à l'autre à chaque fois que vous sollicitez un autre passage ou une autre cible avec la bille.
Si vous réussissez à débloquer le double bonus et l'extra-balle dans une même partie, vous déclenchez alors le "Spécial" qui peut vous donner droit à une partie gratuite (ou à la remontée des cibles selon la configuration du flipper).
A noter également la présence de 2 rollover qui jouent sur l'état du bumper. Le premier Rollover allume le bumper (et vous fait gagner plus de points lorsque vous sollicitez ce dernier dans cet état). Le second rollover éteint le bumper.
Il existe également 2 passages au bas du flipper dont les leds changent alternativement d'état lorsque vous sollicitez n’importe quel contact ou cible du flipper. Le nombre de point engrangé lorsque la bille passe par ces contacts change bien évidement en fonction de l'état (allumé ou éteint) de la led de l'insert.
Voila, je connais désormais précisément les règles du jeu du BEN HUR et il va me falloir maintenant reproduire la "mécanique du jeu" et reproduire la réaction des leds des inserts suite à ce que touche ou par ou passe la bille.
Lors du salon j'ai également acheté une porte pour mon futur flipper ainsi que des boutons-poussoirs que j'ai prévu d'utiliser pour l'ajout des crédits, pour la sélection du nombre de joueurs et pour le lancement de la partie. J'ai également acheté un amplificateur, deux haut-parleurs ainsi que le lanceur pour la bille.
Enfin avant de repartir du salon, j'ai également récupéré le transformateur et le circuit d'alimentation d'origine de mon BEN HUR auprès de Frédéric (que je remercie également à nouveau). Car à ce stade, je ne disposais en fait d'aucune alimentation pour les batteurs et les autres bobines. Cette alimentation se compose d'un gros transformateur multi-tensions (implanté sur une planche), lequel est associé à 2 ponts-diode et à des protections par fusibles.
Gestion matricée des contacts du flipper
/////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////
Quelques jours après le salon, je reprend le développement de mon flipper. Maintenant que je dispose de l'alimentation, je me pose la question de savoir si je commence la gestion des contacts du flipper ou si je "travaille" sur l'alimentation des batteurs.
Bon... autant être franc. La partie gestion de l'alimentation des bobines est celle sur laquelle je suis le moins à l'aise (elle me fait flipper un peu !). J'ai lu pas mal de chose sur les sites internet et je ne suis pas à l'aise sur la gestion et le pilotage des tensions "élevées". D'un commun accord avec moi même... je décide de botter en touche encore un moment et de continuer par la gestion des contacts. D'un autre côté, je me dis aussi que si je monte les batteurs, je risque de jouer un bon moment et de ne plus avancer sur le développement du flipper.
La gestion la plus simple et efficace de gérer les contacts des passages de la bille ainsi que les contacts des cibles (fixes ou tombantes) ainsi que du contact du bumper et du contact de détection de perte de la bille est d'utiliser un câblage de type matricé. Je ne vais pas rappeler le principe de ce type de câblage ici (il existe une multitude de sites pédagogiques traitant du sujet sur Internet).
Comme à l'habitude, il existe une excellente bibliothèque pour arduino concernant la gestion des contacts matricés. La dernière version de la librairie permet entre autre de détecter l'activation ou la désactivation d'un contact avec qui plus la possibilité de gérer l'appuie de plusieurs contacts simultanément. Cette dernière possibilité est fondamentale dans le cadre de la gestion des cibles tombantes ... plus précisément lorsque la bille tape entre la jointure de 2 cibles en faisant ainsi tomber ces 2 cibles à la fois. Dès lors, il est impératif que l'arduino puisse détecter ce cas de figure.
Je fais donc dans un premier temps un essai de détection avec un petit clavier matricé 12 touches relié aux ports de l'arduino MEGA-2560 (en utilisant des résistances de tirage de 10 kohms sur les colonnes). Je remonte facilement les infos liées à la touche sollicitée dans le moniteur de début de mon PC.
Bon il me faut maintenant appliquer le montage matricé à l'ensemble des contacts du BEN HUR. Mine de rien, le BEN HUR dispose de 35 contacts (+ 3 autres correspondant à des boutons-poussoirs que je veux ajouter ... j'y reviendrais plus tard). Il me faut donc réaliser une matrice monopolisant 13 ports d'entrées/sorties sur mon arduino (7 lignes et 6 colonnes) afin de disposer d'une capacité de lecture de 42 contacts max. (capable donc de prendre en charge les 38 contacts du BEN HUR).
J'ai donc retiré pour une énième fois le plateau du flipper de son support de développement et comme à l'accoutumé je l'ai plaqué contre un mur pour commencer les opérations de câblage.

J'insiste sur cette étape pour informer les personnes qui comme moi n'ont pas l'habitude des flipper pour rappeler qu'un plateau pèse quand même son poids. Entre le plateau en bois proprement dit, les batteurs, le dispositif de remonté de cibles, les décors, etc... mon plateau atteint tout de mème xx Kg ! (poids à venir)
Le deuxième point que je voudrais aborder concerne le câblage présent sous le plateau. Au premier abord lorsque vous découvrez l'arrière du plateau d'un flipper, le câblage peu paraître très impressionnant et on se demande comment il peut être possible de s'y retrouver. Pourtant après quelques temps, il vous sera relativement facile de repérer les câblages dédiés à la gestion des bobines, ceux liés aux contacts, ceux liées à l'éclairage... En analysant le fils existant liés aux contacts et aux cibles, j'ai constaté que ces derniers devaient être aussi câblés de façon matricée. Toutefois j'ai eu toutes les peines du monde à pouvoir effectuer le repérage exact (il n'est pas évidement de suivre avec précision les câbles dans les torons très serrés). De plus afin de faciliter le câblage, le fabricant a réalisé des doubles connexions sur certains contacts... Au bout d'un moment j'ai du me résoudre à devoir reprendre tout le câblage depuis zéro !
J'ai donc du dessouder et défaire le câblage de toutes les cibles et contacts... Désormais seul le câblage des bobines est d'origine sur mon plateau.
Lorsque j'ai commencé à vouloir faire mon propre flipper, je m'étais toujours dit et imaginé que je réaliserais un beau câblage... Bon dans le fait, celui que j'ai fait n'est pas trop "top"... J'ai privilégié un câblage au plus court entre les contacts plutôt qu'un toron qui serpente entre les contacts. A ma décharge, j'ai ré-utilisé les câbles récupérés sur le flipper et il m'était difficile de faire autrement. Mais c'est promis... pour mon flipper 100 % personnel je ferais un beau câblage.
Bon voilà... j'ai fini de câbler tous les contacts de "façon matricé". J'ai pris à nouveau soins d'éloigner autant que faire ce peu ces câbles de ceux de l'alimentation des bobines pour éviter toute interraction par effet induit. J'ai ramené ces derniers au centre du plateau (où je vais positionner mon arduino) et centralisé ceux-ci sur un connecteur femelle.
J'ai également ajouté un second connecteur femelle séparé dédié à l'alimentation des arduino (source 12 V) ainsi qu'à l'alimentation du ruban à leds et des leds liées à l'éclairage du décor (sources 5 V). J'ai en fait été obligé d'utiliser 2 alimentations 5 V.
Lorsque j'ai essayé d'utiliser une seule alimentation 5 V, je me suis aperçu que la luminosité de leds de l’éclairage du décor subissaient des variations lumineuses lorsque celles du ruban à leds étaient en action. Même si mon alimentation est de bonne qualité, la très faible variation de la tension se faisait ressentir sur les leds. Bon du fait que je disposait d'alimentations +5 V de "récup", ceci ne m'a pas posé de problème.
Par contre pour mon prochain flipper, pour les leds liées à l'éclairage du décor, j'envisage peut être d'utiliser également un ruban à l'aide (ceci me permettra d'éviter d'avoir à utiliser 2 alimentation 5 V et également de pouvoir modifier l'ambiance et les couleurs de l'éclairage du décor).
Une fois le câblage des contacts terminé, j'ai réalisé un petit test en connectant temporairement un arduino avec une plaque Breadboard pour récupérer les contacts (photo du dessus) et j'ai pu vérifier que j'arrivais bien à "lire l'état" de ces derniers. Bon... à ce stade, une chose me chagrine tout de même. Lorsque je regarde le câblage que j'ai du réalisé pour relier tous les contacts, certaines liaisons atteignent pratiquement 1 mètre. J'ai d'ailleurs choisi de placer ma platine arduino au centre du plateau pour optimiser et raccourcir au minimum la longueur des fils entre les contacts et l'arduino. Le problème est qu'en l'état, ces fils peuvent être considérés comme de véritables "antennes" susceptibles de ramasser toutes sortes de perturbations radioélectriques (émission radiofréquence de GSM et routeur WIFI, etc...) ainsi que des perturbations électrostatique (ESD). Tout ça n'est vraiment pas "bon" pour les entrées de l'arduino.Aussi, en partant du boulot j'ai récupéré un buffer de type 74HC244 qui me servirait de composant "tampon" et de "protection buffer" vis à vis des ports d'entrées de l'arduino. Après essai, il s'avère que je n'arrive plus à lire correctement l'état de mes contacts. Je suspecte que la vitesse de commutation du composant ne soit pas assez rapide avec celle du balayage de la matrice réalisée par l'arduino. Il me faut faire un essai avec un 74LS244.. que je n'ai pas sous la main... Bon... l'utilisation direct du câblage des fils sur les entrées de l'arduino ne m'inspire vraiment pas... Mais tant pis je vais câbler l'arduino sans le buffer de protection et je le rajouterais par la suite.
A l'heure ou j'écris ces lignes, j'utilise le flipper depuis 2 mois... et je n'ai en fait jamais ajouté le composant "buffer" et l'arduino n'a pas "bronché" ! Toutefois je ferais des essais avec un 74LS244 et compte vraiment ajouter ce dernier sur mon prochain flipper.
Je dois maintenant positionner l'arduino MEGA 2560 au centre de plateau. Sachant que ce flipper est pour moi un flipper "prototype", je n'envisage pas de réaliser un circuit imprimé comme je le ferais pour mon prochain flipper. Je vais donc utiliser une plaque de développement pastillées sur laquelle je souderais les composants. En dépit de leurs nombreux avantages, les arduino ont toutefois à mon avis un très gros défaut... Leur implantation.
De mémoire, à l'origine la carte de l'arduino a été conçue par un élève dans le cadre d'un projet d'étude dans une école. Ce dernier avait choisi de disposer les ports d'entrées/sorties du microcontrôleur sur 4 rangées de connecteurs femelle au pas de 2,54 mm. Le souci majeur est que ces connecteurs ne sont pas eux même positionnés sur un pas de grille de 2.54 mm (pour simplifier on ne peux pas rapporter par dessus une plaque de développement au pas de 2.54 mm car les connecteurs ne tombent pas en face des trous de la plaque pastillée.
J'ai donc été obligé de monter l'arduino MEGA 2560 à plat sur la plaque de développement pastillée et d'utiliser des connecteurs de "reprises" pour relier les ports d'entrées/sorties de l'arduino au connecteur femelle des contacts du flipper (voir la photo du dessus). Le résultat fait vraiment "bricolé" et ne me plait pas... mais malheureusement je n'avais pas beaucoup d'autre choix... Sur la photo on distingue les 2 arduino (le principal - MEGA-2560 et le secondaire UNO 328 dédié à la gestion des leds) avec des connecteurs permettant de les alimenter.
Mon développement avance désormais très bien et très vite. J'ai quasiment fini de reproduire les règle du jeu de BEN HUR et à programmer l’interaction entre les lampes sous les insert set le passage de la bille dans les couloirs et sur les cibles. Je gère également les différentes phases du jeux avec l'activation du DOUBLE BONUS et de l'EXTRA-BALLE ainsi que la comptabilisation du score (qui s'affiche pour le moment dans la fenêtre de débug de mon PC).
A noter que j'ai modifier quelques éléments par rapport aux règle initiales. Je fais par exemple clignoter le voyant DOUBLE BONUS (au lieu de l'allumer en "fixe" sur le flipper original). De même, le voyant EXTRA-BALLE s'allume et s'éteint progressivement au lieu de rester fixe. Les deux Rollover du milieu ont une interaction mutuelle de leur illumination et la cible du SPECIAL ne génère pas de partie gratuite mais simplement un super "Bonus" de points.
Pour le moment je teste encore le flipper "à la main" en sollicitant les contact s et les cibles avec les doigts ou en lançant la bille dessus manuellement car je n'ai toujours pas attaqué l'alimentation des batteurs.
La programmation n'est pas trop compliquée. Une fois encore et suite à de nombreuses questions, je vous confirme que le développement du flipper reste dans le domaine du possible. L'écriture du programme ne nécessite en fait qu'un jeu restreint d'instructions. Par exemple la gestion d'une cible se résume à ce type de programmation (je vous le "fait" en mode simplifié et en Français pour bien comprendre).
Si je touche la cible .... je teste l'état du Bonus.... s'il n'y a pas de BONUS alors le score est augmenté de 100 points sinon le score est augmenté de 500 points
Voilà c'est un peu simplifié comme explication, mais c'est à peu près la philosophie utilisée. Donc si vous avez déjà un peu d'expérience de programmation en langage "C" ... cela reste accessible... à condition quand même que vous ayez déjà réalisé quelques projets (pas forcément liés au flippers) avant de vous lancer. Car même si le recours aux bibliothèques de gestion des claviers matricés, des matrices à leds et des rubans à leds mâche en grande partie le travail le plus complexe, il y a quand même pas mal de subtilités et d'astuces de programmation à savoir maîtriser (gestion des rebonds des contacts, gestion de tableaux, de temporisations, etc...). Je pense en fait que la partie la plus compliquée reste la gestion de l'affichage des scores et des animations sur la matrice à leds.
Affichage des scores sur matrice à leds
/////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////
Je dois maintenant réaliser la partie affichage des scores. J'avais un temps (très court) envisagé d'afficher le score sur des afficheurs 7 segments pour reproduire l'exact fonctionnement du flipper original. Arpès une rapide analyse, j'ai pensé que l'utilisation d'un affichage sur une matrice à leds serait en fait plus simple. Sachant que je ne voulais pas utiliser la première matrice que j'avais conçue (que je me réserve pour mon flipper 100 % personnel), j'ai donc décidé d'en refaire une version "ligh" (avec une taille et une résolution moindre). La première matrice que j'avais conçue était en fait composée de 5 matrices à leds (24 x 16) que j'avais retournée à 90° pour créer une matrice plus grande d'une résolution de 80 x 24 leds.

Pour cette nouvelle matrice, je vais me contenter d'utiliser uniquement 2 matrices mise cote à cote afin d'obtenir une matrice d'une résolution de 48 x 16 leds.
J'ai donc ressorti le programme de l'ancienne matrice et commencer à travailler pour l'adapter au nouveau format en me disant que ça devrait être fait en 2 cuillères à pot... Le problème est que du fait du changement de la résolution et du fait que les matrices sont désormais utilisées dans le sens "standard" et non plus tournée à 90°, ça m'a pris pas moins de 2 jours complet pour ré-écrire quasiment tout le programme.
La première tâche a été de redéfinir la police permettant d'afficher les nombres. En raison de la faiblesse de la résolution, celle ci-est moins "belle" et un peu plus grossière que celle de la première matrice.
Le second problème est que je ne pouvais plus afficher "en clair" le nombre de la bille "en jeu" car je ne disposant pas d'assez de place en largeur.

J''ai donc contourné le problème en représentant directement les billes sur la matrice (1 bille, 2 billes ou 3 billes). Le 3ème problème concerne les nombreuses petites animation que j'avais faite lors de l'affichage des points que j'ai du ré-écrire... Brès ça m'a pris plus se temps que prévu... J'en ai profité pour ressortir mon ancienne matrice et mettre la nouvelle matrice "light" à côté pour voir la différence (les 2 parties de la nouvelle matrice ont été temporairement placées l'une a côté de l'autre - raison pour laquelle elle ne semble pas droite et qu'elle présente un petit espace au milieu). Vous pourrez également voir ces 2 matrices en fonctionnement dans la vidéo en bas de page.

Mon développement de la matrice est désormais suffisamment avancé pour que je puisse la relier et la piloter par l'arduino MEGA-2560 principal. Je connecte donc les 2 arduino via une liaison série. Dans le cas de la liaison série entre les 2 premiers arduino (MEGA-2560 et le UNO 328 pour le pilotage des leds), la liaison "physique" entre les 2 platine est relativement courte (tout au plus une quinzaine de centimètre).
Par contre la longueur du câble de liaison série entre le MEGA-2560 principal et celui qui gère l'affichage de la matrice est de l'ordre du mètre ! Une fois encore j'ai envisagé l'utilisation d'un couple de montage à base de MAX232 pour fiabiliser et sécuriser cette liaison. Après un premier essai sans ces circuits... et le fait que la matrice des contact continue de fonctionner sans protection particulière, Je décide de m'en passer. Je prévois juste d'utiliser au minimum un câble blindé pour ce raccordement.
Voila le développement avance désormais à pas de géant. Nous sommes dans le courant du mois d'octobre 2016 et la génération et l'affichage du score sur la matrice (en fonction des cibles et passage de la balle) est maintenant implémenté. Je ne gère pas encore le nombre de joueur, ni la perte de bille, mais tout fonctionne correctement (sauf que je teste encore le tout à la main... n'ayant toujours pas branché les batteurs).
Pour en revenir au fonctionnement de la matrice, je peux afficher des scores de 00 à 9.999.990. Dans les fait et en raison de la difficulté du flipper, je me contente d'un affichage jusqu'à 999.990.
L'autre point à signaler et que j'avais (lors du développement initial de la matrice) prévu de pouvoir afficher le score en lui envoyant directement la valeur des 6 digits au travers de la liaison série. Toutefois afin de limiter la durée de la trame série transmise vers la matrice (dans le cas d'un score plus important que sur 6 digits (afin de donner la priorité des cycles machine à la surveillance de l'action de la balle par le premier arduino), J'ai finalement décidé d'envoyer uniquement 5 octets pour afficher les scores (et les animations sur la matrice).
Dans le cas des scores, j'utilise le premier octet pour indiquer à la matrice le N° du joueur et de la bille en cours d'utilisation.Deux bit de cet octet servent également à indiquer à la matrice si elle doit afficher le score "simplement" ou avec une petite animation (consultez le tout début de la description pour plus s'info). Ensuite j'envoi le score sur 4 bits (donnée de type "long"... me permettant d'envoyer un score de 0 à 2.147.483.648 !!!). Ensuite au niveau de la matrice j'effectue une conversion pour récupérer et afficher chaque digit du score (qui plus est de façon centrée sur la matrice).
L'avantage de cette méthode est que je ne suis pas également obligé de convertir systématiquement le score en "Digit" au niveau de l'arduino MEGA-2560 principal avant chaque envoi vers l'arduino de la matrice à leds. Une fois encore, j'optimise le temps de gestion de l'arduino principal pour la surveillance du plateau.
Il m'est également possible d'envoyer des commandes (toujours sur 5 octets) à l'arduino de la matrice à leds afin qu'il affiche des animations et diverses informations. J'y reviendais un peu plus tard.





Je procède maintenant à la fixation des 2 matrices sur une planche dans laquelle j'ai réalisé 2 trous (à l'arrache dans mon évier !!!) pour les futurs haut-parleurs. Au dos de la planche, j'ai vissé la platine Arduino MEGA-2560 que j'ai relié à la matrice.
Je fixe le tout sur le haut de mon châssis afin de disposer d'un "simili" fronton. L'affichage est placé anormalement haut par rapport à un "vrai" flipper, mais ceci me permet d'enlever et de repositionner plus facilement le plateau sur le châssis sans toucher la planche de l'afficheur (pour rappel, le plateau est assez lourd et pas trop facile à manipuler).
Parralèlement à ça, le développement du flipper avance encore. Je sais maintenant détecter la perte de la bille et l'affichage du N) de la bille en cours de jeux. Il me faut également trouvé un nom pour ce flipper. Ironie ou coup du sort, il se trouve qu'un remake du film BEN HUR est sortie en septembre au cinéma ! Je vais donc appeler sobrement le flipper BEN HUR 2016 !
Bon ... avant de me faire plaisir (oui je pense que c'est une des parties les plus sympa du développement) et d'attaquer les animations sur la matrice je me décide ENFIN a regarder comment alimenter et piloter ces fichus batteurs. Toutefois il me reste une dernière chose à faire avant.
En remontant le décor une fois les leds de rétro-éclairage mise en place, je m'étais aperçu qu'il y avait une pièce en plastique de cassée et manquant tout en haut du plateau. J'avais décidé de revenir plus tard sur ce problème... Et plus tard... c'est maintenant. Cette pièce est juste au niveau de la "sortie" de bille. Le système utilisé sur les flipper de cette époque consistait à prévoir une pièce en plastique à mi-hauteur de la bille pour guider celle-ci. Sur les flipper plus récent, il y a une lame en métal placée perpendiculairement au plateau qui guide la balle.
Le problème que j'ai est que je ne dispose pas de morceau de plastique aussi fin et surtout que ce type de matière n'est pas simple à couper et que je ne pourrais pas obtenir de résultat satisfaisant. J'ai finalement eu recours à un morceau de... de... enfin je ne sais pas trop quelle type de matière c'est. Je l'avais acheté auprès de la surface de bricolage du coin. Cette matière à l'avantage d'être assez solide et de pouvoir se découper au ciseau ! Une vis, un peu de colle, encore un petit bout de renfort et le tour est joué ! Un élément du décor (non visible sur les photos) vient recouvrir en partie l'ensemble. Bon... malgré ce dernier, on voit que la pièce a été "rapporté". I faudrait à la limite que je refasse l'ensemble avec la même matière... mais bon... pour le moment ça ira bien.
En tout cas, je compte bien utiliser cette matière pour concevoir les pièces et le prototype de la structure du décor et des éléments de guidage de mon prochain flipper 100 % maison.



Nous y voila enfin ! Comme je l'ai déjà indiqué un peu avant, j'appréhendais cette étape car c'est la partie que je maîtrisais le moins. Les bobines des flippers nécessitent d'être généralement alimentés sous des tensions relativement élevées. Comme tous les utilisateurs de flippers le savent ces tensions peuvent être très dangereuses. Si vous envisagez donc de développer vous aussi votre propre flipper, il conviendra donc d'être extrêmement prudent et de toujours respecter les règles de sécurités. Après avoir hésité un long moment et même recherché de 'aide auprès de mon père (et oui... même à 48 ans, il est bon de trouver de bons conseils auprès de son papa ! Bon alors.... papa.. on les alimente comment ces bobines ? en continu ? en alternatif ?
Comme j'avais récupéré le transformateur d'origine, le choix d'une alimentation en alternatif s'imposait. J'ai donc avec la plus grande précaution branché le transformateur et analysé les différentes tensions qu'il fournissait.
Ce dernier dispose d'un enroulement au niveau du primaire et de plusieurs enroulement au niveau du secondaire. J'ai pu repérer que la tension d'alimentation dédiée aux bobines était de 37 VAC. Il y a aussi une tension de 6,5 VAC (pour les lampes) et enfin des tensions de 16 Vcc et 27 Vcc. Pour ma part, seule la tension de 37 VAC m' intéresse (sur laquelle le fusible avait sauté... pas bon signe ça !!!).
Bon.. allez quand il faut y aller... il faut y aller... Je décide d'appliquer la tension sur la bobine de la remontée de bille. Je sais bien sur qu'il faut IMPÉRATIVEMENT alimenter la bobine pendant un très court instant sans quoi de part la consommation excessive de celle-ci, la bobine va chauffer et griller et/ou le fusible va griller aussi !
Je relie donc un côté de la bobine sur la sortie de l'alimentation et d'un geste bref (j'avais mis des gants... on ne rigole pas !!!). je met en contact fugitivement l'autre borne de l'alimentation.
Un gros "CLAC" au niveau du système de remontée de bille me montre que cela fonctionne (avec un prime une très grosse étincelle et un peu de soudure fondue qui s'échappe du fil de liaison qui était étamé... Ha... oui... ça rigole pas ! Je refais quelques essais avec toujours la présence de cette méchante étincelle et d'un bruit extrêmement "sec" et fort au niveau de la mécanique de la remontée de bille.




Grâce à Alain, j'ai pu avoir accès au schéma théorique du flipper (en fait du modèle GUN MEN, qui est également un flipper fabriqué par STAAL et qui dispose d'une architecture quasi identique). Sur la carte originale, les bobines sont pilotées par des triacs dont les références en sont malheureusement plus fabriquées.
N'ayant aucune expérience avec ce type de composant, j'ai du rechercher un peu de doc sur Internet. Je suis tombé sur un excellent site www.sonelec-musique.com qui m'a été d'un grand secour. J'ai donc sélectionné un Triac (un peu au pifomètre). Mon choix s'est porté sur un BTB12 capable d'encaisser 12 A. Je ne connais pas la consommation exacte des bobines (je l'estime pour le modèle qui consomme le plus entre 2 et 4 A... donc le modèle choisi devrait convenir). Je réalise donc le montage ci-contre afin d'essayer à nouveau de piloter la bobine de la remontée de bille. Concernant la tension de commande 12 V du schéma, je la remplace en fait par la tension 16 Vcc présente sur une des sorties de l'alimentation du BEN HUR.
Ainsi, il n'y aura aucune liaison électrique entre les arduino et l'alimentation des bobines. Une fois encore j'applique une touche petite impulsion manuelle sur la tension de commande du TRIAC qui fait son travail sans broncher ! Cool... je suis en bonne voie.
Il faut maintenant que j'applique ce montage aux batteurs. Comme je l'ai déjà indiqué, une bobine (en raison de sa consommation excessive) ne doit jamais rester alimenter plus de quelques centaine de millisecondes sous peine de surchauffe et de destruction. En ce qui concerne la commande du bumper, de la remontée de cible et de la remontée de la bille, cette alimentation "impulsionnelle" est facile à gérer (voir explication ci-dessous). Pour les batteur en revanche, le problème est géré autrement. Je ne vais pas rentrer ici en détail dans les explications du pilotage des bobines des batteur (vous trouverez d’excellentes informations à ce sujet dans la rubrique liens utiles). Pour faire simple, les batteurs sont pilotés par une bobine dotée de 2 enroulement en série. Le premier enroulement (appelé bobine d'appel) dispose d'une résistance très faible, générant une très grande puissance d'activation (nécessaire pour renvoyer la bille). Le 2ème enroulement (appelé bobine de maintien) dispose d'une résistance plus importante (elle consomme donc moins... tout en étant capable de laisser le batteur en position haute). Au repos (lorsque vous n'appuyez pas sur le bouton, un contact (appelé EOS Diminutif de "End of Stroke") vient shunter la bobine de maintien. Lorsque vous sollicitez le bouton du batteur à ce moment seule la bobine d'appel s'alimente en provoquant la levée rapide (et puissante) du batteur. Dans le même moment un mécanisme vient ouvrir le contact EOS permettant à la bobine de maintien de "rentrer" dans le circuit d'alimentation. A ce stade, la résistance totale de la bobine du batteur correspond à la résistance de la bobine d'(appel + la résistance de la bobine de maintien. Il en résulte que le batteur est capable de rester en l'air... mais que le courant traversant la bobine du batteur diminue suffisamment pour que la bobine ne chauffe pas trop et ne "crame" pas.
Ces sur ces bases que j'ai commencer à relever et observer les câbles du batteur du plateau du BEN HUR. Je ne comprenais pas pourquoi les contacts EOS n'étaient pas reliés directement aux bobines des batteurs et qu'au lieu de cela, des fils de connexion (à mon gout très "fins") revenait vers la platine électronique du BEN HUR. Cette incohérence a en fait aussi été à l'origine de ma réticence monter l'alimentation sur les batteurs. il m'a fallu d'avoir le schéma du flipper entre les main pour comprendre qu'en fait le contact EOS était géré "électroniquement" et pas "en direct sur la bobine. Vous trouverez ci-dessus le schéma de fonctionnement que j'ai donc utilisé.
Pour faire à nouveau simple, le contact EOS ne vient pas directement sunter la bobine de maintien, mais ce dernier vient piloter un 2ème Triac. Ainsi lorsque le contact EOS est fermé, la bobine d'appel est alimentée en priorité par le BTB12 du bas. Lorsque le contact s'ouvre, ce BTB12 n'alimente plus la bobine d'appel et c'est alors l'autre BTB12 qui alimente le tout. Le résultat est donc identique. A bien y réfléchir, je préfère cette façon de fonctionner qui si elle est plus "complexe" n'applique aucune contrainte électrique sur le contact EOS (c'est la raison pour laquelle - oxydation mise ) part, les contacts EOS des batteurs sont en excellent état et ne présentent aucune trace d’étincelage.
Pour compléter l'explication du schéma, j'ai utiliser un simple petit relais miniature pour commuter la tension du 16 V issue du transformateur vers les boutons-poussoirs des batteurs (afin d’inhiber leur fonctionnement en fin de partie). Cette solution me permet de disposer d'une totale isolation entre l'alimentation des arduino et celle du transformateur du BEN HUR.










J'ai donc ajouté 6 triacs BTB12 sur la plaque de développement pastillée (pour rappel, le plateau dispose de 3 batteurs nécessitant chacun 2 triacs). Bon autant dire tout de suite que ce dont je suis le MOINS fier dans toute cette réalisation, c'est le montage de mes composants sur cette plaque de prototypage. J'ai vraiment travaillé comme un cochon... J'ai câblé les composants "à la vas vite"... En cas de panne, j'en connais un qui va pleurer... Vous pourrez également remarquer la présence d'un nouveau connecteur me permettant de recevoir les contacts EOS. Dans le même genre d'esprit, j'ai ajouté contact sur contact sur la carte au lieu de prévoir un seul "grand" contact. D'un autre côté ayant développé le flipper par étape, je ne pouvais pas savoir à l'avance où j'allais. Et encore une fois, le BEN HUR me sert de laboratoire pour le prochain flipper.
J'ai aussi ramené tous fils des bobines vers ma platine électronique et ajouté un nouveau connecteur pour pouvoir désolidariser toutes les éléments du plateau lorsque je dois intervenir sur la platine électronique.
Ayant des boutons-poussoirs qui me restait et que je n'avais pas utilisé lorsque j'avais construit ma borne d'arcade (les modèles de couleur orange), j'ai pu tester mon montage avec succès en les câblant de façon temporaire. Les 3 batteurs fonctionnent correctement !
Je vais maintenant monter définitivement ceux que j'avais acheté pour le flipper. N'ayant pas d'idée sur la façon dont j'allais piloter les batteurs, j'avais acheté des modèles "mécaniques" vert translucide avec un contact déporté. En fait en raison des fort courant en jeu, ce type de bouton n'ai constitué que d'une tige en plastique qui revient avec un ressort de rappel. Cette tige est destinée à venir appuyer sur 2 lamelles entrant alors en contact. Etant au tout début du développement, j'avais choisi des lamelles avec contacts au Tungstène capables de commuter de très forts courants.
J'avais également choisi un contact "double" (je voulais m'en servir pour venir "lire" l'état du bouton du batteur pour interagir avec des éléments du flipper).
J'ai donc découpé 2 triangles et réalisé des trous pour pouvoir recevoir les boutons-poussoir.
La photo de gauche montre l'intérieur du triangle une fois fixé sur les côté du support du flipper. Pour faire le "choses bien", j'avais même ajouté des leds à l'arrière des boutons-poussoirs pour pouvoir les rétro-éclairer de l'intérieur... La "grande classe" ! oui... mais...
Oui .. mais à la remise sous tension et nouvel essai... Ça ne marchait plus !!! Impossible de piloter les batteurs. Après quelques minutes de recherche, je me suis aperçu que les lamelles avec embouts au tungstène semblent générer un mauvais contact (pour les courants faibles).
Du coup... retour en arrière... n'ayant pas la patience de devoir commander et d’attendre de recevoir des lamelles "standards" , je me suis décidé à monter les boutons-poussoirs oranges sur le support du flipper.
Ça y est, les 3 batteurs fonctionnent. Quel plaisir de pouvoir enfin jouer avec le flipper ! Bon... la remontée de bille, la remontée de cible et le lanceur ne sont pas encore opérationnel, mais déjà ça ressemble déjà plus à un "vrai" flipper. Premier constat, les batteurs de gauche sont un peu "faiblards" et surtout vibrent terriblement lorsqu'on laisse les batteurs en l'air (à la limite du bruit d'un buzer !). Celui de droite vibre un peu (mais c'est normal car il est alimenté en alternatif). Un réglage du contact EOS règle le problème de "mollesse" du batteur. Un ajustement du fourreau des batteurs de gauche limite le bruit des vibrations.
La chose sur laquelle je voudrais aussi insister si vous envisagez de développer votre propre flipper... c'est le bruit assourdissant que font les batteurs lorsqu'ils sont utilisés "en plein air" et pas au sein d'une caisse. Attention, il faut mieux prévenir votre entourage et que ce dernier soit conciliant ! Pour la petite histoire, mon chien monte se réfugier systématiquement à l'étage dès qu'il me vois ne serais-ce que brancher la prise d'alimentation du flipper tant il ne supporte plus le bruit.
Après quelques parties, très vite je me rend compte (et c'est une des premières règles sur laquelle je devrais être très très attentif lorsque je concevrais mon propre flipper): LA BILLE EST UNE TUEUSE !!! A plusieurs reprise la bille décolle littéralement en tapant les cibles du milieu (elle est même sortie à 2 reprises du plateau !). Je me rappelle que sur le BEN HUR du salon, la bille avait également tapée à plusieurs reprises sur la glace (au même endroit). J'ai donc fini par me résoudre à ajouter une plaque transparente (type plexy) au dessus du plateau afin d'éviter que la balle ne sorte du plateau !
15 minutes de jeu... première panne !!!
Hé oui après une petite quinzaine de minutes, j'observe que les 7 dernières leds en bout de chaîne du ruban se mettent à émettre des "flashs" lorsque j'utilise les batteurs. Là.... grosse frayeur... J'ai pourtant pris soins d'éloigner autant que possible les leds du ruban des fils d'alimentation des bobines. Pourtant désormais à chaque fois que j'utilise les batteurs, les leds "flash" ! Y a t'il eu un effet d'induction qui aurait généré la destruction et la fragilisation de ces leds ? Je n'en mène pas large... jusqu'à ce que je tapote le support du flipper et observe le même phénomène.. J'ai poussé un grand "ouf" de soulagement et compris que les très intenses vibrations générées par les batteurs ont fini par dessouder une des connexions des leds (juste à l'endroit ou commence la panne des 7 leds) et à chaque fois que j'utilise les batteurs, le contact est instable et génère ce phénomène. Un petit coup de fer à souder plus tard, tout est rentré dans l'ordre !
Pour la petite histoire, j'ai eu le phénomène 2 autres fois (toujours un fil qui se dessoudait) .il faut dire que les connexions de mes leds sont un peu légère et ne repose que sur un petit connecteur d'un millimètre. Ceci me permet d'avoir encore un élément supplémentaire d'expérience pour la conception de mon prochain flipper, dans lequel je réaliserais un petit circuit imprimé "support" sur lequel je pourrais disposer de contact à souder capable de résister aux vibrations
Comme je m'y attendait une fois les batteurs en fonctionnement, j'ai passé plusieurs jours à ne faire que de jouer... et mon développement a pris un peu de retard !
Sécurité... Faites ce que je dis... Pas ce que je fais !!!
Bon... voilà je le rappelle à nouveau, il est IMPÉRATIF de prendre toutes les mesures de sécurité lorsque vous développez ou intervenez sur un plateau de flipper.



Dans la vidéo présente à la fin de ce site, à chaque fois que vous me verrais en train de mettre les main sous le plateau, j'ai toujours bien pris soins de couper l'alimentation des bobines. La seule chose où j'ai été un peu "léger" est le fait que j'ai laissé assez longtemps la planche de bois sur laquelle repose le transformateur principal directement au pied de mon support sans autre protection.
Après quelques semaines j'ai vraiment pris conscience qu'un accident pouvait arriver à tout moment et j'ai fini par "habiller" le transformateur et une connexion secteur. Les connexions qui restent toujours apparentes sont en basse tension. En temps normal toutes cette partie se trouve dans le fond de la caisse d'un flipper et donc non accessible.
Branchement de la remontée de bille et du bumper
/////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////
J'attaque maintenant le câblage de l'alimentation de la remontée de la bille et du bumper. Comme indiqué ci-avant, la durée d’alimentation de ces bobines doit être très courte afin de ne pas les endommager (entre 100 et 250 ms env. selon les informations que j'ai pu recueillir sur des forum).
La commande de cette alimentation impulsionnelle va devoir être générée par mon arduino. il va me falloir donc disposer d'un système isolant totalement la tension d'alimentation de l'arduino et celle des bobines. Pour ce faire j'utilise un optocoupleur MOC3021 dont j'ai repris le schéma de câblage sur Internet.Il m'aurait été facile de reproduire la temporisation de 100 à 250 ms avec l'arduino et d'appliquer directement un port de l'arduino sur le transistor de commande de la diode interne du MOC3021.




Le soucie est que si pour une raison ou une autre (bug de programmation ou "plantage/mauvaise initialisation" du port d'entrée/sortie), ce port vient à rester au niveau logique haut, la bobine va chauffer et griller rapidement. J'avais déjà été alerté par cette possibilité sur le site de Ben Heck.
J'ai donc ressorti de mes souvenir un des premiers montage que m'avais appris mon père lorsqu'il m'apprenait à matriser les portes logiques. J'ai donc réalisé un petit montage à l'aide d'une porte "ET" permettant de limiter la durée de l'impulsion générée sur le MOC3021 même si le port de l'arduino devait rester au niveau logique haut. Je suis quelque part content de voir que même dans un système dit hig-htech, il soit toujours nécessaire d'avoir recours à des notions d'électroniques de base.
J'ai donc commencé par expérimenter le montage sur une plaque de développement sans soudure avec l'utilisation d'un relais en vue et place de la bobine. Une fois le montage opérationnel, je suis passé à la phase de câblage sur ma plaque.
Petit point de réflexion que j'adresse aux plus jeunes qui pourraient lire ce site... ne négligez rien de vos études... Vous voyez un "truc" appris il y a plus 30 ans a fini par m'aider aujourd'hui (même si j'aurais pu - en dépannage - aller à la pèche aux infos sur Internet).
En ce qui concerne la base de temps générant la durée de l'impulsion, je l'ai déterminée.. au "pifomètre" ! Oui n'ayant pas d'oscilloscope sous la main, j'ai évaluer que l'impulsion devrait être suffisante avec un 0,1 µf et une résistance de 10 K. J'ai par la suite ajouté plusieurs résistances de 10 K en série pour obtenir un fonctionnement "normal" des bobines. C'est pour ça que vous verrais beaucoup de résistances sur ma platine.
Dans le même ordre d'esprit, il était nécessaire de disposer de résistances de 470 ohms pour le pilotage des MOC3021... ayant fait mes fond de tiroirs et toujours afin d'éviter d'avoir à éviter un jour de plus pour me procurer les bonnes valeurs... j'ai jouer du montage en série des résistances pour arriver à peu près aux valeurs nécessaires.
Pour la petite info, j'avais oublié au début de penser à la résistance de tirage à la masse sur l'entrée de la porte qui est reliée au port de l'arduino.
A la mise sous tension de l'arduino, le temp que celui-ci s'initialise, le port de l'arduino prenait un état instable qui m'a bien fait sursauter du fait que la bobine s’était mise à jouer des castagnettes !
La résistance de tirage a donc été ajoutée et tout est rentré dans l'ordre.
Les photos ci-dessus montent la platine principale équipée de tous les triacs ainsi que du petit relais blanc permettant l’inhibition des boutons-poussoir des batteurs. La photo de droite montre "l'envers du décor" ! Une nouvelle fois, c'est promis: je prévois de réaliser un "joli" circuit imprimé pour mon prochain flipper.
Le système de remontée de bille fonctionne parfaitement .tout au moins jusqu'à ce que je remettre le capot qui cache le couloir de la remontée de bille. Depuis la bille ne remonte pas systématiquement vers le lanceur. Le problème vient peut être de la durée de l'impulsion appliquée sur la bobine qui n'est pas assez longue. Avant de modifier celle-ci à l'aveugle il me faudra vérifier tout ceci à l'oscilloscope. D'un autre côté, le problème vient peut être de la "bidouille" que j'ai trouvé au niveau du ressort du dispositif de la remontée de bille... ou du système en lui même qui était vraiment oxydé et que j'ai remis en état du mieux que j'ai pu... mais qui n'est toutefois pas parfait. Pour régler temporairement le problème, j'ai ajouté un test lors de la procédure qui permet à l'arduino de vérifier l'état du contact de perte de la bille une fois l'impulsion générée sur la bobine. Si le contact n'est plus sollicité, l'arduino en déduit que la bille est bien arrivée vers le lanceur. Si le contact de perte de bille est de nouveau activé... c'est que la bille est redescendu et qu'il faut générer à nouveau une impulsion sur la bobine pour ejecter à nouveau la bille.
Concernant le bumper, les premiers tests lassaient apparaître un bumper "mou du genoux"... qui semblait ne pas réagir.. ou avec quelquefois du retard. Après un petit instant, je me suis rappelé que je procédez à la prise en compte des information en provenance des cibles et des couloirs (et donc du bumper aussi) que lorsque le contact était relâché. Dans le cas du bumper, j'activez donc la bobine uniquement lorsque la bille avait deja touché la coupelle et qu'elle commençait à s'en éloignée. Quelques petites modification de mon code ont rendu au bumper son fonctionnement normal. Enfin presque car je m'apperçoit qu'aucune détection ne se fait lorsque la bille touche la coupelle du bumper par le haut. Après une petite analyse, je me rend compte que le petit creuset qui est actionné par la tige du bumper est légèrement désaxée vers le bas. Dès lors la détection ne se fait pas correctement. Pour le moment j'ai laissé le bumper tel quel, mais il me faudrait déplacer le contact pour l'ajuster précisément sous le petit creuset pour avoir un fonctionnement sur les 360° du bumper... Affaire à suivre donc.
A ce stade, il ne me reste plus qu'à câbler la bobine du système de remontée de cible. Toutefois cette opération va être retardée car je me suis aperçu que la bobine qui était sur le flipper avait surchauffé et que cette dernière était entrée en court-circuit... et qu'"il va me falloir la changer. Il en resulte que j'ai du remonter manuellement les cibles "à la main" un très long moment lors de mes parties.
Confection d'un support pour le lanceur
////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////
Jusqau'à présent j'ai du lancer la bille "à la main" dans le couloir. En ayant un peu marre, je me décide enfin de monter le lanceur. Problème... n'ayant pas de caisse, son montage a été moins évident que prévu. J'ai du me bricoler un espèce de support en bois que j'ai fixé sur le support du flipper.
C'est assez rudimentaire. il y a un petit jeu au niveau du lanceur... mais ça marche quand même !



